Description
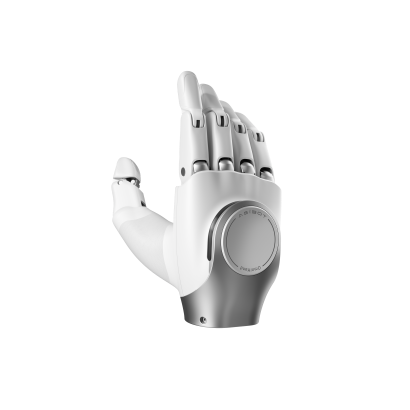
AgiBot OmniHand 2025 – Compact High-DOF Dexterous Robotic Hand
The AgiBot OmniHand 2025 is a compact, high-degree-of-freedom dexterous robotic hand designed to enhance interactive intelligence across humanoid robots and robotic arms. As the industry’s only compact high-DOF dexterous hand in its class, it combines small form factor, low weight, and rich tactile feedback to enable natural, safe, and expressive manipulation.
With universal compatibility and integrated tactile sensing, OmniHand 2025 is ideal for interactive services, research, education, and light-duty manipulation tasks.
Key Capabilities
Interaction & Intelligence
- Human-like gesture interaction enabled by 16 DOF
- Supports common gestures and expressive hand motions
- Back-of-hand touch interaction for advanced human–robot interaction
- Designed to enhance interactive and embodied intelligence
Perception & Awareness
- Integrated tactile sensing array with 400+ force-sensing taxels
- High tactile resolution (0.1 N, with tactile sensors)
- Enables precise contact detection and safer interaction
- Anti-pinch design for user-friendly operation
Manipulation & Physical Performance
- Compact structure optimized for humanoid robots
- Maximum fingertip force: 5 N (typical value)
- Suitable for light grasping, object handling, and touch interaction
- Optimized for reliability and long-term use
System Architecture & Integration
- Communication interfaces: CAN FD / RS485
- Plug-and-play compatibility with mainstream robots and robotic arms
- Designed for easy integration into existing robotic systems
- Supports secondary development and custom control strategies
Safety, Reliability & Maintenance
- Lightweight design reduces inertia and interaction risk
- Anti-pinch structure improves operational safety
- Tactile feedback enables controlled and compliant grasping
- Designed for stable and repeatable operation
Customization & Scalability
The AgiBot OmniHand 2025 supports flexible deployment:
- Compatible with multiple humanoid robot platforms
- Suitable for single-hand or dual-hand configurations
- Scalable from research prototypes to production deployments
- Adaptable to interactive, educational, and service-oriented use cases
Technical Specifications
- Degrees of Freedom: 10 active + 6 passive
- Weight: 500 g
- Dimensions: 180 × 85 × 38.5 mm
- Maximum Fingertip Force: 5 N (typical)
- Tactile Sensors: 400+ taxels
- Tactile Resolution: 0.1 N (with tactile sensors)
- Communication Interface: CAN FD / RS485
- Compatibility: Mainstream humanoid robots and robotic arms
Application Scenarios
- Interactive services and gesture-based interaction
- Research and education in robotic manipulation
- Human–robot interaction experiments
- Light-duty grasping and object handling tasks
Proof & Readiness
- Industry-leading compact high-DOF design
- Integrated tactile sensing for safe interaction
- Proven compatibility with mainstream robotic platforms
- Designed to enhance embodied intelligence and interactivity
Reviews
There are no reviews yet.